















Руководство описывает технические параметры абсолютного углового датчика с CAN интерфейсом, производимого в СКБ ИС, а также программирование, установку параметров работы и подключение датчика.
- Главная
- Блог
- Справочник
- АБСОЛЮТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ С CANOPEN ИНТЕРФЕЙСОМ — ТЕХНИЧЕСКОЕ РУКОВОДСТВО
АБСОЛЮТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ С CANOPEN ИНТЕРФЕЙСОМ — ТЕХНИЧЕСКОЕ РУКОВОДСТВО
27.01.2022
16035
Оглавление:
- ВВЕДЕНИЕ
- ОПРЕДЕЛЕНИЯ
- ТРЕБОВАНИЯ ПО БЕЗОПАСНОМУ ИСПОЛЬЗОВАНИЮ
- СЕТЬ CANOPEN И ПРОФИЛЬ ДАТЧИКА
- ОБЪЕКТЫ ДАТЧИКА
- СВОДНАЯ ТАБЛИЦА ОБЪЕКТНОГО СЛОВАРЯ
- ОБЪЕКТНЫЙ СЛОВАРЬ
- Объект 1000 Тип датчика
- Объект 1001 Регистр ошибок
- Объект 1003 Массив ошибок
- Объект 1005 COB-ID объекта синхронизации SYNC
- Объект 1008 Имя устройства
- Объект 1009 Номер варианта конструктива
- Объект 100A Номер версии программы
- Объект 100C Период опроса (Guard time)
- Объект 100D Множитель контрольного времени (Life time factor)
- Объект 1010 Сохранение параметров
- Объект 1011 Восстановление параметров по умолчанию
- Объект 1014 COB-ID объекта аварийных сообщений
- Объект 1016 Контрольное время
- Объект 1017 Период контрольных посылок
- Объект 1018 Идентификаторы датчика
- Объект 1029 Поведение при ошибке
- Объект 1800 Параметры передачи объекта PDO1
- Объект 1801 Параметры передачи объекта PDO2
- Объект 1A00 Карта размещения информации PDO1
- Объект 1A01 Карта размещения информации PDO2
- Объект 2100 Индекс скорости обмена
- Объект 2101 Номер узла
- Объект 2800 Счётчик для дополнительной передачи PDO1
- Объект 2801 Счётчик для дополнительной передачи PDO2
- Объект 6000 Параметры функционирования
- Объект 6001 Количество отсчётов на оборот
- Объект 6002 Полный диапазон измерения
- Объект 6003 Величина предустановки
- Объект 6004 Величина угла
- Объект 6200 Таймер для циклической передачи PDO1
- Объект 6500 Режим функционирования
- Объект 6501 Максимальное количество отсчётов на оборот
- Объект 6502 Максимальное количество оборотов
- Объект 6503 Сообщения об авариях
- Объект 6504 Поддерживаемые сообщения об авариях
- Объект 6505 Предупреждения
- Объект 6506 Поддерживаемые предупреждения
- Объект 6507 Профиль и версия программы
- Объект 6508 Время работы датчика
- Объект 6509 Величина смещения позиции
- Объект 650B Заводской номер датчика
- ТЕХНИЧЕСКИЕ ДАННЫЕ
- ЭЛЕКТРИЧЕСКИЕ СОЕДИНЕНИЯ И УСТАНОВКИ
1 Введение
Настоящее руководство описывает технические параметры абсолютного углового датчика с CAN интерфейсом, производимого в СКБ ИС, а также программирование, установку параметров работы и подключение датчика.
Руководство описывает использование датчика и должно быть дополнено паспортом, который является неотъемлемой частью документации датчика.
2 Определения
Используемые аббревиатуры:
| CAL | CAN Application Layer |
| Прикладной уровень 7-уровневой OSI модели | |
| CAN | Controller Area Network |
| Локальная сеть контроллеров | |
| CiA | CAN in Automation |
| «CAN в автоматизации», международная ассоциация производителей и пользователей CAN-продуктов | |
| COB | Communication Объект |
| Объект для передачи данных и параметров | |
| COB ID | COB identifier |
| Идентификатор объекта передачи данных и параметров | |
| DS | Draft standard |
| Рекомендумый стандарт, документ CiA | |
| EEPROM | Electrically Erasable Programmable Read-Only Memory |
| Электрически стираемое ПЗУ, энергонезависимая память | |
| LSB | Least significant бит/byte |
| Младший значащий бит/байт | |
| MSB | Most significant бит/byte |
| Старший значащий бит/байт | |
| NMT | Network Management — Управление сетью |
| CAL элемент для конфигурации сети и обслуживания ошибок | |
| Node ID | Номер CAN-узла, присвоенный датчику |
| OD | Объект Dictionary |
| Словарь объектов передачи данных и параметров | |
| PDO | Process Data Объект |
| Объект передачи данных | |
| RTR | Remote Transmission Request |
| Удалённый запрос | |
| SDO | Service Data Объект |
| Сервисный объект, обеспечивающий доступ к параметрам прибора | |
| SYNC | Synchronization message |
| Объект синхронизации, используется для синхронизации устройств на шине | |
| 180h | Знак h в конце числа означает его 16-чное представление |
Дополнительную информацию можно найти в документах:
- BOSCH CAN specification 2.0
- CiA draft standard DS 301, CAN Application Layer and Communication Profile
- CiA draft standard DS 406, CANopen Device Profile for Encoders CiA
- CiA draft standard DS 306, Electronic data sheet specification for CANopen
3 Требования по безопасному использованию
Руководство должно быть обязательно прочитано перед эксплуатацией датчика.
Датчик — точный измерительный прибор, использующийся для определения углового положения и количества оборотов и для перевода этих величин в соответствующие электрические сигналы для соответствующих систем. Датчик может использоваться только для этих целей.
Датчик должен устанавливаться и подсоединяться только квалифицированным персоналом. Также ознакомьтесь с инструкцией производителя устройства, на которое устанавливается датчик.
Перед эксплуатацией оборудования проверьте электрические соединения.
Датчик должен работать в оговорённых условиях. В частности питающее напряжение не должно превышать установленный предел.
Транспортировка или хранение прибора должно быть в оригинальной упаковке. Никогда не роняйте датчик и не превышайте допустимых вибраций.
Избегайте ударов по валу или по корпусу.
Избегайте скручивания или изгиба корпуса.
Никогда не делайте жёсткого соединения вала датчика с валом ведущего устройства, используйте для соединения муфту.
Не открывайте датчик для каких-либо механических изменений в нём. Пользователь должен снимать крышку только для присоединения кабелей и установки адреса и скорости передачи.
Не делайте никаких изменений в электрической схеме датчика.
Полностью экранируйте корпус датчика и подключаемый кабель. Сделайте соответствующее заземление устройства, в которое встроен датчик.
Для подключения датчика используйте только сигнальный кабель с витыми парами (CAN+ с CAN- и 0V с +24V).
Не производите подключения и отключения во время работы датчика.
4 Сеть CANopen и профиль датчика
4.1 Общая информация
CAN-шина (Controller Area Network) разработана фирмами BOSCH и Intel для обеспечения быстрой, недорогой передачи данных в автомобильных приложениях. В настоящее время CAN-шина используется во всех сферах промышленной автоматизации. CAN-шина — это магистральная шина для высоконадёжной передачи данных по последовательному каналу в широковещательном режиме. CAN использует короткие сообщения (телеграммы), максимум 94 бита. CAN не использует определённый адрес. Содержимое сообщения неявно включает в себя адрес источника и приёмника. Приёмник реагирует на сообщения, предназначенные только ему.
Характеристики CAN-шины:
- Скорость передачи до 1 Mбит/сек при длине кабеля до 40 м.
- Возможность работы в режиме реального времени, определено максимальное время задержки для сообщений с высоким приоритетом. Обычно <120 мкс для 1 Mбит/сек.
- Теоретически до 127 узлов на шине. «Plug and play» подключение.
- Шина с нагрузочными резисторами на обоих концах.
- Гарантированная целостность данных в сети. Повреждённые сообщения обозначаются как ошибочные.
- Все узлы сети одновременно принимают сообщения. Возможна синхронизация.
- Приоритет сообщений определяется идентификатором сообщения.
CANopen построен на верхнем уровне CAL (CAN Application Layer), с использованием регламента и протоколов связи CAL. CANopen представляет только часть функций CAL, оптимизированных для упрощённых систем, работающих в режиме реального времени.
Центральное понятие в CANopen — это Объектный Словарь устройства (Device Объект Dictionary). Словарь упорядочен по группам объектов; каждый объект адресуется с использованием 16-битного индекса. Для доступа к отдельным элементам в структурах используется 8-битный субиндекс.
Основное разделение объектов в словаре CANopen:
| Объектный словарь CANopen | |
| Индекс | Объект |
| 0000 | не используется |
| 0001-001F | Статические типы данных (такие как двоичные, целые и т.п.) |
| 0020-003F | Сложные типы данных (предопределённые структуры) |
| 0040-005F | Сложные типы данных, определённые производителем |
| 0060-007F | Статические типы данных для данного профиля устройств |
| 0080-009F | Сложные типы данных для данного профиля устройств |
| 00A0-0FFF | зарезервировано |
| 1000-1FFF | Область профиля обмена данными (напр. Тип устройства, регистр ошибок, поддерживаемое кол-во PDO) |
| 2000-5FFF | Область профиля, характерного для производителя |
| 6000-9FFF | Стандартизированный профиль устройства (напр. «DSP-406 Device Profile for Encoders» CiA) |
| A000-FFFF | зарезервировано |
4.2 Структура сообщений
CANopen CAN-телеграмма содержит идентификатор (COB ID), код длины данных (DLC) и до 8 байтов данных:
| COB ID | длина | Байт 1 | Байт 2 | Байт 3 | Байт 4 | Байт 5 | Байт 6 | Байт 7 | Байт 8 |
| 11 бит | X | x | x | x | x | x | x | x | X |
11-битный идентификатор (COB-ID) состоит из 4-битного кода функции (FC) и 7- битного номера узла (Node ID)
| Код функции (FC) | Номер узла (Node ID) | |||||||||
Код функции определяет тип и приоритет сообщения. Меньший COB ID даёт более высокий приоритет.
Таблица типов сообщений и соответствующих COB ID
| Тип сообщения | COB ID | |
| Широковещательные сообщения | ||
| NMT | 0 | Объект управления сетью для инициализации контроля сети |
| SYNC | 80h | Объект для синхронизации устройств CAN-сети |
| Сообщения, адресуемые к узлам | ||
| Emergency | 80h + Node ID | Критические объекты для сообщений об ошибках |
| PDO1 (transmit) | 180h + Node ID | 1й объект данных процесса (Process Data Объект) для передачи данных в режиме реального времени |
| PDO2 (transmit) | 280h + Node ID | реального времени PDO2 (transmit) 280h + Node ID 2 |
| SDO (transmit) | 580h + Node ID | Служебный объект (Service Data Объект) для чтения параметров через объектный словарь |
| SDO (receive) | 600h + Node ID | Служебный объект (Service Data Объект) для изменения параметров через объектный словарь |
| Heartbeat | 700h + Node ID | Объект тактовых сообщений (Heartbeat message) периодически вызываемый для поддержания протокола проверки работоспособности устройств (Node Guarding Protocol) |
4.3 Передача данных процесса
Объект данных процесса (PDO) используется для передачи данных датчика в режиме реального времени одному или нескольким потребителям.
Структура PDO-сообщения:
| COB ID | Длина | Байт 1 | Байт 2 | Байт 3 | Байт 4 | |
| PDO1 | 180h + node ID | 4 | LSB | x | x | MSB |
| PDO2 | 280h + node ID | 4 | LSB | x | x | MSB |
Байты Байт1 — Байт4 содержат 32-битовое беззнаковое значение позиции с учётом смещения (см. объект 6509h стр. 34).
Объект PDO может передаваться в синхронном или асинхронном режиме. Для синхронизации устройств служит объект синхронизации SYNC, который периодически передаётся синхронизирующим приложением. Объект SYNC представлен как предопределённый и имеет двухбайтовую структуру:
| Байт 1 | COB-ID = 80h |
| Байт 2 | 0 |
Распределение синхронных (Synchronous PDO) и асинхронных (Asynchronous PDO) объектов передачи данных во времени показано на рисунке:

Синхронный режим задействован когда объект 1800h / 1801h (для PDO1 / PDO2) субиндекс 2 имеет значение от 1 до 240 (F0h). При значении 1 данные передаются на каждую принятую SYNC телеграмму; при значении n передача происходит на каждую n-ю SYNC телеграмму, когда объект 2800h / 2801h содержит 0. Если объект 2800h / 2801h имеет ненулевое значение k, то передача данных происходит только k раз. Счётчик передач PDO телеграммы обнуляется в случае изменения позиции или по команде NMT сброс. Так, при изменении позиции, PDO телеграмма передаётся n раз. Если n=1, передача происходит при каждом изменении позиции.
Асинхронный режим задействован когда объект 1800h / 1801h субиндекс 2 содержит величину FEh.
В этом режиме PDO передаются в цикле. Время цикла в миллисекундах определяется объектом 1800h / 1801h субиндекс 5. Если содержимое объекта 0, то PDO не передаётся.
Примеры различных режимов передачи PDO1 / PDO2 показаны в таблице
| 1800h / 1801h | 2800h / 2801h | Описание | |
| суб 2 | суб 5 | ||
| асинхронный режим | |||
| FEh | 0 | x | Передача PDO выключена |
| FEh | 4мс | 0 | Циклическая передача каждые 4мс |
| FEh | 3мс | 5 | Циклическая передача каждые 3мс, но только 5 раз после изменения позиции |
| FEh | 7мс | 1 | Циклическая передача каждые 7мс один раз при изменении позиции |
| синхронный режим | |||
| 0 | x | x | Передача PDO выключена |
| 2 | x | 0 | Передача PDO на каждую 2ю SYNC телеграмму |
| 3 | x | 12h | Передача 18 раз (=12h) по каждой 3й SYNC телеграмме |
| установки PDO1 по умолчанию | |||
| FEh | 203h | 0 | Циклическая передача каждые 515мs (203h) |
| установки PDO2 по умолчанию | |||
| 2h | 100h | 0 | Передача по каждой 2й SYNC телеграмме |
Передача PDO также выключена, когда MSB (бит 31) объекта 1800h/1801h — субиндекс 1 равен 1.
Запись в объект 1800h/1801h субиндекс 1 влияет только на этот старший бит.
4.4 Обмен сервисными данными (работа с объектным словарём)
Все параметры датчика хранятся в объектном словаре (см. раздел 5 «Объекты датчика»). Адреса параметров (индексы) стандартизированы, они могут быть прочитаны или изменены путём чтения/записи сервисных объектов (Service Data Объектs — SDO).
SDO сообщение имеет структуру:
| COB-ID | Длина | Байт 1 | Байт 2 | Байт 3 | Байт 4 | Байт 5 | Байт 6 | Байт 7 | Байт 8 |
| 11-бит | 0..4 | Команда | Индекс | Субиндекс | Параметр | ||||
| LSB | MSB | LSB | ... | ... | MSB | ||||
COB-ID равен 580h+nodeID для передачи Датчик → Мастер
или 600h+nodeID для передачи Мастер → Датчик.
DLC — длина кода параметра в байтах
Байт 1 — Код команды, определяет действие с параметром:
| Команда | Описание |
| 22h | Установка параметра датчика |
| 40h | Запрос величины параметра |
| 43h | Ответ на запрос параметра |
| 60h | Подтверждение датчиком изменения параметра |
| 80h | Сообщение аварийного завершения, также мастеру передаётся сообщение об ошибке |
Индекс и Субиндекс соответствуют значениям в объектном словаре
Величина Параметр состоит из 0...4 байтов
В случае ошибки передаётся сообщение об аварийном завершении (SDO abort message), которое имеет структуру:
| COB ID | длина | Байт 1 | Байт 2 | Байт 3 | Байт 4 | Байт 5 | Байт 6 | Байт 7 | Байт 8 |
| 580h + node ID | 8 | 80h | Индекс | Субиндекс | Байт ошибки 0 | Байт ошибки 1 | Байт ошибки 2 | Байт ошибки 3 | |
Индекс и субиндекс соответствуют запрашиваемому объекту.
Поддерживаются следующие сообщения:
| 0504 0001 | Спецификатор команды неизвестен или не работает |
| 0601 0001 | Попытка чтения только записываемого объекта |
| 0601 0002 | Попытка записи только читаемого объекта |
| 0602 0000 | Объект не существует в Словаре объектов |
| 0606 0000 | Доступ к объекту неудачный из-за аппаратной ошибки |
| 0609 0011 | Субиндекс не существует |
| 0609 0030 | Величина вне допустимого диапазона (для записи) |
| 0800 0000 | Общая ошибка |
| 0800 0020 | Неверная подпись «load» или «save» |
4.5 Служба аварийных сообщений
Внутренние ошибки датчика или ошибки связи вызывают аварийное сообщение, которое имеет структуру:
| COB-ID | Длина | Байт 1 | Байт 2 | Байт 3 | Байт 4 | Байт 5 | Байт 6 | Байт 7 | Байт 8 |
| 80h+node ID | 8 | Код ошибки | Регистр ошибок 1001h | Аварии 6503h | Предупреждения 6505h | — | |||
| Байты 2..1: Код ошибки: | |
| 0000 | Ошибка сброшена или ошибки отсутствуют |
| 1000 | Общая ошибка |
| 5530 | Ошибка энергонезависимой памяти (EEPROM) |
| 6010 | Сброс по сторожевому таймеру |
| 7320 | Ошибка позиции (кода датчика) |
| 7510 | Ошибка связи по CAN-линии (busoff) |
| 8130 | Ошибка от охранного протокола NodeGuard (см. п.4.7) |
| Байт 3: Регистр ошибок (см. объект 1001h, стр.21) | |
| Бит 0 | Общая ошибка |
| Бит 4 | Ошибка связи |
| Бит 5 | Ошибка от охранного протокола NodeGuard |
| Бит 7 | Ошибка памяти EEPROM |
| Байты 5..4: Аварии (см. объект 6503h, стр.33) | |
| Бит 0 | Недействительный код положения |
| Бит 1 | Аппаратная ошибка |
| Байты 7..6: Предупреждения (см. объект 6505h, стр.33) | |
| Бит 2 | Сброс по сторожевому таймеру |
C позиции рассмотрения ошибок датчик может находиться в двух состояниях: A (ошибок нет) или B (ошибки появлялись и не устранены):
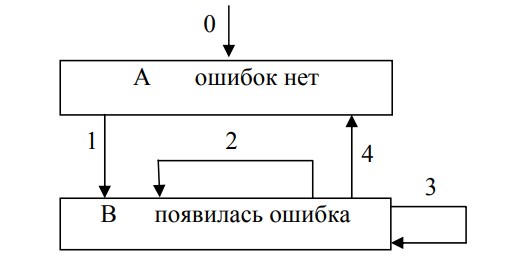
В зависимости от переходов между этими состояниями будут передаваться следующие аварийные сообщения:
0. После инициализации датчика, в случае отсутствия ошибок, датчик переходит в состояние A (нет ошибок), и сообщения об ошибке не посылаются.
1. Обнаружена ошибка, указанная в первых трёх байтах аварийного сообщения. Датчик переходит в состояние B. Передаётся аварийное сообщение с соответствующим кодом ошибки (см. выше),содержащее регистр ошибок (объект 1001h). Код ошибки записывается в объект 1003h — массив ошибок.
2. Одна, но не последняя, ошибка устранена. Передаётся аварийное сообщение, содержащее код 0000 (ошибка сброшена) в поле кода ошибок, а также оставшиеся ошибки и предупреждения в соответствующих полях.
3. Обнаружена новая (не первая ошибка). Датчик остаётся в состоянии B и передаёт аварийное сообщение с соответствующим кодом ошибки. Новый код ошибки заносится в верхний элемент массива ошибок (объект 1003h).
4. Все ошибки устранены. Датчик переходит в состояние отсутствия ошибок A и передаёт аварийное сообщение с кодом ошибки 0000.
4.6 Инициализация сети и запуск программы датчика
Датчик является сетевым устройством, которое может находиться в определённых состояниях. Конечный автомат может быть представлен следующей диаграммой NMT-состояний:

После включения датчик проходит три стадии инициализации и переходит в Подготовительный режим. В конце инициализации датчик даёт оповещение в CANсети посредством посылки стартового сообщения (Boot-up message) на стадии (2). Это сообщение имеет структуру:
| COB-ID | DLC | Байт 1 |
| 700h+node ID | 1 | 00h |
В Подготовительном режиме (Pre-Operational state) возможен обмен SDOтелеграммами, но не дозволена передача PDO, что разгружает шину и делает конфигурирование датчика более удобным.
Возможность обмена сообщениями в различных режимах приведена в таблице:
| ИНИЦИАЛИЗАЦИЯ | ПОДГОТОВИТЕЛЬНЫЙ | РАБОЧИЙ | ОСТАНОВ | |
| PDO | X | |||
| SDO | X | X | ||
| SYNC | X | X | ||
| Emergency Объект | X | X | ||
| Boot-up Объект | X | |||
| NMT | X | X | X |
X — сервис может функционировать
Состояние CAN-узла может быть изменено напрямую посылкой соответствующей NMT-команды, которая передаётся как неподтверждаемый объект и имеет структуру:
| COB-ID | Длина | Байт 1 | Байт 2 |
| 0 | 2 | Байт команды | Номер узла |
Номер узла определяет целевой узел. Если он равен 0, то команда адресована ко всем узлам.
Байт команды определён следующим образом:
| Байт команды | Описание | Номер события по диаграмме NMTсостояний |
| 01h | Запуск CAN-узла | (3), (6) |
| 02h | Останов CAN-узла | (5), (8) |
| 80h | Переход в подготовительный режим | (4) |
| 81h | Перезапуск приложения (CAN-узла) | (12), (13), (14) |
| 82h | Перезапуск сетевых установок узла | (9), (10), (11) |
Перезапуск может быть запущен двумя способами — перезапуск узла и перезапуск сетевых установок. Первый режим вызывает инициализацию параметров связи с индексами от 1000h до 2FFFh. Во втором режиме происходит инициализация параметров датчика с индексами 6000h — 6FFFh, а затем — также параметров связи. После перезапуска по NMT-команде, передаётся стартовое сообщение (boot-up) на стадии (2), а также делается задержка в 4 сек. Во время процесса перезапуска, параметры принимают значения из энергонезависимой памяти (EEPROM). Если память недоступна, параметры принимают значения по умолчанию, и создаётся соответствующее сообщение об ошибке (см. п. 4.5).
Параметры Номер узла (объект 2101h, стр.31) и Индекс скорости обмена (объект 2100h, стр.30) инициализируются особым способом. Сначала величина Номер узла читается по поворотным переключателям. Если величина не равна 0, то она принимается, и значение Индекса скорости обмена также читается по переключателям. Если Номер узла по переключателям равен 0, то Номер узла и Индекс скорости обмена берутся из энергонезависимой памяти EEPROM. Если память EEPROM недоступна, то принимаются значения по умолчанию, Номер узла=1 и Индекс скорости передачи соответствует 1 MBaud.
Индекс скорости обмена (Baudrate Index) связан со скоростями обмена данными таким образом:
| Индекс скорости обмена | Скорость обмена | Переключатель |
| 8 | 1000 kБит | 7 |
| 7 | 800 kБит | 6 |
| 6 | 500 kБит | 5 |
| 5 | 250 kБит | 4 |
| 4 | 125 kБит | 3 |
| 3 | 100 kБит | 2 |
| 2 | 50 kБит | 1 |
| 1 | 20 kБит | 0 |
| 0 | 10 kБит | — |
4.7 Контроль работоспособности
Датчик поддерживает два способа контроля работоспособности канала: протокол проверки узла мастером (Node and Life Guarding Protocol) и протокол проверки связи с мастером (Heartbeat Protocol). Контроль работоспособности необходим, если датчик настроен на нерегулярную передачу данных; в противном случае работоспособность может определяться по наличию переданных данных.
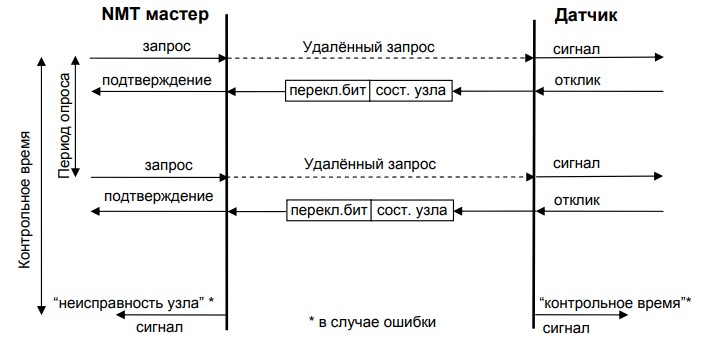
4.7.1 Протокол проверки узла
Этот протокол (Node guarding protocol) используется для определения ошибок в сети при помощи удалённого запроса. NMT мастер делает удалённый запрос датчика через регулярные отрезки времени — период опроса (Guard time). Отклик датчика содержит код состояния узла и переключаемый бит и имеет следующую структуру:
| COB-ID | Длина | Байт 1 |
| 700+node ID | 1 | Перекл. бит (7) + Сост. узла (6..0) |
Состояние узла может принимать значения:
- 0 Инициализация
- 4 Останов (Stopped)
- 5 Работа (Operational)
- 127 Подготовительный режим (Pre-operational)
Переключаемый бит меняет значение после каждого запроса.
Контрольное время (Node Life Time) определяется как произведение интервала Guard Time и множителя Lifetime Factor. Если датчик не откликается в течение контрольного времени, то посредством службы Emergency Service (стр. 12) генерируется сообщение об ошибке.
Протокол проверки узла использует следующие объекты датчика:
| Объект | Параметр | Описание |
| 100Ch |
Период опроса (Guard time) |
0 — Протокол проверки узла не используется 1..FFFFh — период опроса, мсек |
| 100Dh |
Множитель (Lifetime factor) |
0 — Протокол проверки узла не используется 1..FFh — множитель |
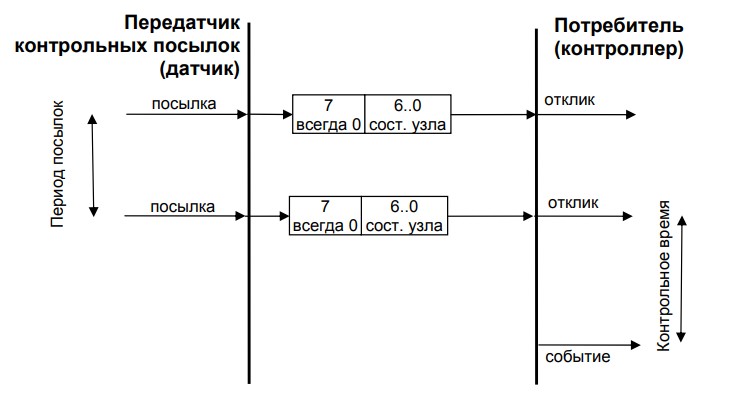
4.7.2 Протокол проверки связи
Этот протокол рекомендован ассоциацией CiA как новый протокол. Протокол определяет службу контроля над ошибками (Error Control Service) без необходимости использования удалённых запросов. Передатчик периодически посылает сообщения (Heartbeat messages) следующей структуры:
| COB-ID | Длина | Байт 1 |
| 700+node ID | 1 | Состояние узла |
Состояния узла определены так же, как в протоколе проверки узла (Node Guarding protocol) (стр.16).
Один или более потребителей принимают сообщения. Отношения между передатчиком и потребителем конфигурируются посредством объектов:
| Объект | Параметр | Описание |
| 1016h суб1 | Контрольное время потребителя (Consumer heartbeat time) | Определяет допустимый интервал ожидания посылок в мсек. Должен быть больше периода посылок передатчика. |
| 1017h | Период посылок передатчика (Producer heartbeat time) | Определяет время в мсек циклических посылок передатчика. Если равно 0, то протокол не используется. |
В датчике угла ЛИР-ДА158 передатчиком является датчик, а потребителем должен быть управляющий контроллер.
Невозможно использовать одновременно оба протокола контроля работоспособности в одном датчике.
Если все объекты — 100Ch, 100Dh, а также 1017h не равны 0, то приоритетным является протокол Heartbeat. Т.е. при задании ненулевого периода (1017h) протокол NodeGuard отключается. Для его включения нужно обнулить 1017h, а затем задать ненулевые значения 100Ch и 100Dh.
Приоритет Heartbeat соблюдается и при инициализации датчика при перезапуске или включении. В этом случае включение протокола определяется по наличию ненулевых значений в указанных объектах, сохранённых в EEPROM.
5 Объекты датчика
5.1 Сводная таблица объектного словаря
В таблице использованы следующие обозначения:
| Объект | Шестнадцатиричные индекс и субиндекс объекта |
| Наименование | Название объекта |
| Тип |
ARR — масив; Unn- беззнаковое целое; Inn — целое (nn — количество бит). |
| Аттр. | ro — только для чтения; rw — для чтения и записи. |
| По умолч. | Величина по умолчанию. |
| Доп. информация | Дополнительные пояснения |
Объекты передачи данных (по DS 301 CiA)
| Объект | Наименование | Тип | Аттр. | По умолч. | Доп. информация | Стр. |
| 1000h | Тип устройства | U32 | ro | 00010196h | Однооборотный датчик (по CiA) | 21 |
| 1001h | Регистр ошибок | U8 | ro | 0h |
бит 0 = общая ошибка |
21 |
| 1003h | Поля стека ошибок | ARR | Содержит 8 последних ошибок или предупреждений | 21 | ||
| 00h | Наибольший субиндекс | U8 | rw | 0h | Кол-во сохранённых сообщений (0..8) | 21 |
| 01h | Последнее сообщение | U32 | ro |
Ошибка или предупреждение: |
21 | |
| ... | ... | ... | ... | ... | ... | |
| 08h | Самое старое сообщение | U32 | ro | Ошибка или предупреждение | 21 | |
| 1005h | COB ID объекта синхронизации | U32 | ro | 80h | Идентификатор объекта синхронизации | 22 |
| 1008h | Имя устройства | U32 | ro | «L158» | Абсолютный датчик углового положения ЛИР-ДА158 | 22 |
| 1009h | Вариант конструктива | U32 | ro | значение | Номер варианта в ASCII коде | 22 |
| 100Ah | Версия программы | U32 | ro | значение | Номер версии программы в ASCII коде | 22 |
| 100Ch | Период опроса | U16 | rw | 0h | Период опроса датчика на контроль работоспособности в мсек | 22 |
| 100Dh | Множитель контрольного времени | U8 | rw | 0h | Множитель для вычисления контрольного времени отклика датчика | 23 |
| 1010h | Сохранение параметров | ARR | 23 | |||
| 00h | Наибольший субиндекс | U8 | ro | 3h | Кол-во вариантов сохранения = 3 | 23 |
| 01h | Все параметры | U32 | rw | Сохранить все параметры | 23 | |
| 02h | Параметры связи | U32 | rw | Сохранить параметры связи | 23 | |
| 03h | Параметры приложения | U32 | rw | Сохранить параметры приложения | 23 | |
| 1011h | Восстановление пар-ров По умолч. | ARR | 24 | |||
| 00h | Наибольший субиндекс | U8 | ro | 3h | No. of reset possibilities = 3 | 24 |
| 01h | Все параметры | U32 | rw | Восстановить все параметры | 24 | |
| 02h | Параметры связи | U32 | rw | Восстановить параметры связи | 24 | |
| 03h | Параметры приложения | U32 | rw | Восстановить параметры приложения | 24 | |
| 04h | Кол-во записей в EEPROM | U32 | ro | Количество попыток записи в энергонезависимую память | 24 | |
| 1014h | COB ID объекта аварийных сообщений | U32 | ro | 80h+NodeID | Идентификатор объекта аварийных сообщений | 24 |
| 1016h | Контрольное время | ARR | 25 | |||
| 00h | Наибольший субиндекс | U8 | ro | 1h | 25 | |
| 01h | Контрольное время проверки работоспособности датчика | U32 | rw | 0h |
Биты 0..15 Контрольное время в мсек |
25 |
| 1017h | Период посылок | U16 | rw | 0h | Период посылок контролируемого на работоспособность датчика в мсек | 25 |
| 1018h | Идентификатор датчика | U32 | ro | 26 | ||
| 00h | Наибольший субиндекс | U8 | ro | 4h | 26 | |
| 01h | ID производителя | U32 | ro | значение | Идентификатор производителя, установленный CiA | 26 |
| 02h | Тип датчика | U32 | ro | 000CA001h 000CB001h | = однооборотный ЛИР158А-CAN = многоборотный ЛИР158A-CAN |
26 |
| 03h | Номер разработки | U32 | ro | значение | Номер разработки датчика | 26 |
| 04h | Заводской номер | U32 | ro | значение | Заводской номер | 26 |
| 1029h | Поведение при ошибке | ARR | Реакция датчика на ошибку | 27 | ||
| 01h | Наибольший субиндекс | U8 | ro | 1h | 27 | |
| 02h | Ошибка связи | U8 | ro | 1h | 1h = не изменять режим | 27 |
| 1800h | Параметры передачи объекта PDO1 | REC | 28 | |||
| 00h | Наибольший субиндекс | U8 | ro | 5h | 28 | |
| 01h | COB ID | U32 | ro | 180h+ ID | Идентификатор объекта = 180h+node ID | 28 |
| 02h | Тип PDO1 | U8 | rw | FEh | FEh = определённый пользователем циклический режим | 28 |
| 05h | Таймер перпередачи PDO1 | U16 | rw | 203h | Время цикла (период передачи) в мсек | 28 |
| 1801h | Параметры передачи объекта PDO2 | REC | 29 | |||
| 00h | Наибольший субиндекс | U8 | ro | 5h | 29 | |
| 01h | COB ID | U32 | ro | 280h+ ID | Идентификатор объекта = 280h+node ID | 29 |
| 02h | Тип PDO2 | U8 | rw | 2h | 2h = синхронный режим передачи | 29 |
| 05h | Таймер передачи PDO2 | U16 | rw | 100h | Время цикла (период передачи) в мсек | 29 |
| 1A00h | Карта размещения информации PDO1 | ARR | 30 | |||
| 00h | Количество объектов, отображаемых в PDO1 | U8 | ro | 1h | 30 | |
| 01h | Содержание PDO1 | U32 | ro | 60040020h | Описывает содержимое PDO1, см. в описании объекта | 30 |
| 1A01h | Карта размещения информации PDO2 | ARR | 30 | |||
| 00h | Количество объектов, отображаемых в PDO2 | U8 | ro | 1h | 30 | |
| 01h | Содержание PDO2 | U32 | ro | 60040020h | Описывает содержимое PDO2, см. в описании объекта | 30 |
Объекты датчика (по DS 406 CiA)
| Объект | Наименование | Тип | Аттр | По умолч. | Доп. информация | Стр. |
| 2100h | Индекс скорости передачи | U8 | rw | 8h |
После установки параметра нужно сохранить память EEPROM и сделать перезапуск |
30 |
| 2101h | Идентификатор узла | U8 | rw | 1h | Возможные значения 1-127 После установки параметра нужно сохранить память EEPROM и сделать перезапуск |
31 |
| 2800h | Счётчик для дополнительной передачи PDO1 | U8 | rw | 0h | Количество повторов передачи одинаковых данных для PDO1 | 31 |
| 2801h | Счётчик для дополнительной передачи PDO2 | U8 | rw | 0h | Количество повторов передачи одинаковых данных для PDO2 | 31 |
| 6000h | Параметры функционирования | U16 | rw | 0h | Бит 0 — направление счёта | 31 |
| 6001h | разрешение датчика (отсчётов) | U32 | ro | значение | разрешение, отсчётов на оборот: напр. 20000h соотв. 17-битному датчику | 31 |
| 6002h | Полный диапазон измерения (отсчётов) | U32 | ro | значение | Полный диапазон измерения: 20000h для 17битного однооборотного датчика | 32 |
| 6003h | Величина предустановки (отсчётов) | U32 | rw | 0h | Величина предустановки для задания смещения отсчёта | 32 |
| 6004h | Позиция (отсчётов) | U32 | ro | Положение вала датчика с учётом смещения (отсчётов) | 32 | |
| 6200h | Таймер передачи PDO1 | U16 | rw | 203h | Идентичен объекту 1800h, субинд. 5 | 32 |
| 6500h | Режим работы | U16 | ro | 4h | Бит 0 — направление вращения | 32 |
| 6501h | Максимальное разрешение | U32 | ro | значение | Максимальное разрешение, отсчётов на оборот | 33 |
| 6502h | Достижимое количество оборотов | U32 | ro | значение | Максимальное количество оборотов (для однооборотных датчиков =1) | 33 |
| 6503h | Сообщения об авариях | U16 | ro | 0h | Поддерживаемые сообщения — см. объект 6504h | 33 |
| 6504h | Поддерживаемые сообщения об авариях | U16 | ro | 5h | Поддерживаются следующие сообщения: Бит 0 = Ошибочные данные позиции Бит 2 = Срабатывание сторожевого таймера |
33 |
| 6505h | Предупреждения | U16 | ro | 0h | Поддерживаемые предупреждения: см. объект 6506h | 33 |
| 6506h | Поддерживаемые предупреждения | U16 | ro | 0h | Поддерживаются следующие предупреждения: Бит 2 = состояние сторожевого таймера |
34 |
| 6507h | Номера версий профиля и программы | U32 | ro | напр. 01050201h | Байты 0..1: Версия профиля =2.01 = 0201h Байты 2..3: Верс. программы = 1.05 = 0105h |
34 |
| 6508h | Время работы датчика | U32 | ro | 0h | Время в 0,1 часа от последнего перезапуска | 34 |
| 6509h | Смещение показаний датчика | U32 | ro | 0h | Смещение вычисляется во время предустановки, см. объект 6003h | 34 |
| 650Bh | Заводской номер | U32 | ro | значение | То же, что и объект 1018h субинд. 4 | 34 |
5.2 Объектный словарь
Объект 1000 Тип датчика
| Описание | Содержит информацию о типе и профиле датчика |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Константа |
| По умолч. | 10196h |
| Значения | Байт 0&1 = 0196h — профиль по CiA Байт 2 = 01h — абсолютный однооборотный датчик угла |
Объект 1001 Регистр ошибок
| Описание | Последняя ошибка |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Только для чтения |
| По умолч. | 0h |
| Значения | Байт 0&1 = 0196h — профиль по CiA Байт 2 = 01h — абсолютный однооборотный датчик угла |
| EEPROM | Не сохр. |
| Значения | Установленный бит соответствует обнаруженной ошибке: Бит 0 — общая ошибка или ошибка величины угла Бит 4 — ошибка связи Бит 5 — ошибка по протоколу NodeGuard Бит 7 — ошибка памяти EEPROM |
При чтении значения объекта сбрасываются все установленные биты ошибок. Таким образом определяется, что ошибки, соответствующие прочитанным битам, появились в интервале между последним и предыдущим прочтениями объекта.
Объект 1003 Массив ошибок
| Субиндекс | 0 |
| Описание | Количество ошибок |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Только для чтения |
| По умолч. | 0h |
| EEPROM | не сохр. |
| Значения | 0..8 |
| Субиндекс | 1..8 |
| Описание | Массив ошибок, элементы 1..8 Каждая новая ошибка сохраняется в 1 элементе (субиндекс 1), существующие значения сдвигаются на одну позицию вниз. |
| Тип данных | беззнаковое 16-разр. целое |
| Доступ | Только для чтения |
| По умолч. | 0h |
| EEPROM | не сохр. |
| Значения |
Объект 1005 COB-ID объекта синхронизации SYNC
| Описание | COB-ID объекта синхронизации |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Константа |
| По умолч. | 80h |
| Значения | Бит 31 — X (незначащий) 30 — 1 устройство производит SYNC-сообщения 0 устройство не производит SYNC-сообщения 29..11 — 0 зарезервирвано для 29-битн. идентификаторов 10..0 = 80h, стандартный идентифткатор |
Объект 1008 Имя устройства
| Описание | Имя устройства в ASCII, данное производителем |
| Тип данных | Строка |
| Доступ | Константа |
| По умолч. | L158 |
| Значения | например, 4Ch 31h 35h 38h соответствует «L158» — абсолютный датчик углового положения ЛИР-ДА158 |
Объект 1009 Номер варианта конструктива
| Описание | Номер варианта конструктива в ASCII |
| Тип данных | Строка |
| Доступ | Константа |
| По умолч. | значение |
| Значения | например, 31h 2Eh 30h 30h = «1.00» |
Объект 100A Номер версии программы
| Описание | Номер версии программы в ASCII |
| Тип данных | Строка |
| Доступ | Константа |
| По умолч. | значение |
| Значения | например, 31h 2Eh 30h 30h = «1.00» |
Объект 100C Период опроса (Guard time)
| Описание | Используется для протокола проверки работоспособности узла (Life Guarding Protocol). Произведение Периода опроса на Множитель (Lifetime factor — объект 100Dh) даёт контрольное время проверки узла. |
| Тип данных | Беззнаковое 16-разр. целое |
| Доступ | Чтение/запись |
| По умолч. | 0h |
| EEPROM | сохр. |
| Значения | 0 — Протокол проверки узла не используется 1..FFFFh — значение период опроса в мсек |
Объект 100D Множитель контрольного времени (Life time factor)
| Описание | Используется для протокола проверки работоспособности узла (Life Guarding Protocol), см. также объект 100Ch. |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Чтение/запись |
| По умолч. | 0h |
| EEPROM | сохр. |
| Значения | 0 — Протокол проверки узла не используется 1..FFFFh — значение множителя |
Объект 1010 Сохранение параметров
Данный объект поддерживает сохранение параметров в энергонезависимой памяти. Для предотвращения непреднамеренной записи используется ключевое слово «save», а объект имеет вид:
| COB-ID | Длина | Команда | Объект | Субиндекс | Data 0 | Data 1 | Data 2 | Data 3 | |
| L | H | ||||||||
| 600h+node ID | 8 | 22h | 10h | 10h | 01..03 | 73h ’s’ | 61h ’a’ | 76h ’v’ | 65h ’e’ |
| Субиндекс | 0 |
| Описание | Наибольший субиндекс |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Константа |
| По умолч. | 4 |
Субиндексы 01..03 позволяют выбрать категорию сохраняемых параметров:
| 01h | Сохранение всех параметров |
| 02h | Сохранение параметров связи |
| 03h | Сохранение параметров приложения |
Объекты, сохраняемые в EEPROM:
| Объект | Субиндекс | Описание | По умолч. |
| Параметры связи | |||
| 100Ch | 0h | Период опроса (Guard Time) | 0h |
| 100Dh | 0h | Множитель (Life Time Factor) | 0h |
| 1016h | 1h | Контрольное время потребителя (Consumer Heartbeat time) |
0h |
| 1017h | 0h | Период посылок передатчика (Producer Heartbeat Time) |
0h |
| 1029h | 1h | Поведение при ошибке | 1h |
| 1800h | 2h | Тип PDO1 | FEh |
| 1800h | 5h | Таймер для циклической передачи PDO1 | 203h |
| 1801h | 2h | Тип PDO2 | 2h |
| 1801h | 5h | Таймер для циклической передачи PDO2 | 100h |
| 2100h | 0h | Индекс скорости передачи данных | 8h = 1MBaud |
| 2101h | 0h | Номер узла | 1h |
| 2800h | 0h | Счётчик передач для PDO1 | 0h |
| 2801h | 0h | Счётчик передач для PDO2 | 0h |
| Параметры приложения | |||
| 6000h | 0h | Параметры функционирования | 0h |
| 6003h | 0h | Величина предустановки | 0h |
| 6509h | 0h | Величина смещения | 0h |
Объект 1011 Восстановление параметров по умолчанию
Данный объект поддерживает восстановление параметров, заданных по умолчанию и сохранение их в энергонезависимой памяти EEPROM. Для предотвращения непреднамеренной перезаписи используется ключевое слово «load». Объект имеет вид:
| COB-ID | Длина | Команда | Объект | Субиндекс | Data 0 | Data 1 | Data 2 | Data 3 | |
| L | H | ||||||||
| 600h+node ID | 8 | 22h | 11h | 10h | 01..03 | 6Ch ’l’ | 6Fh ’o’ | 61h ’a’ | 64h ’d’ |
| Субиндекс | 0 |
| Описание | Максимальный возможный субиндекс |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Константа |
| По умолч. | 4 |
Субиндексы 01..03 позволяют выбрать категорию восстанавливаемых параметров:
| 01h | Восстановление всех параметров |
| 02h | Восстановление параметров связи |
| 03h | Восстановление параметров приложения |
Количество попыток записи в EEPROM доступно через субиндекс 4 объекта 1011h. Эта величина позволяет оценить остаточный ресурс памяти.
| Субиндекс | 4 |
| Описание | Количество попыток записи в EEPROM |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Только для чтения |
| EEPROM | сохр. |
Посредством данного объекта инициируется запись параметров по умолчанию в EEPROM, но датчик продолжает работать с текущими параметрами. Для того, чтобы задействовать параметры по умолчанию, нужно сделать перезагрузку датчика посредством NMT-команды (см. п. 4.6).
Восстанавливаемые параметры приведены в таблице описания объекта 1010h.
Объект 1014 COB-ID объекта аварийных сообщений
| Описание | Идентификатор объекта аварийных сообщений |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Константа |
| По умолч. | 80h + номер узла |
Объект 1016 Контрольное время
| Субиндекс | 0 |
| Описание | Наибольшее значение субиндекса |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Константа |
| По умолч. | 1 |
| Субиндекс | 1 |
| Описание | Контрольное время проверки работоспособности датчика |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Чтение/запись |
| По умолч. | 0 |
| EEPROM | сохр. |
| Значения | Бит 0..15 — контрольное время в мсек |
Объект 1017 Период контрольных посылок
| Описание | Период посылок в мсек контролируемого на работоспособность датчика протокола проверки связи |
| Тип данных | Беззнаковое 16-разр. целое |
| Доступ | Чтение/запись |
| По умолч. | 0 |
| EEPROM | сохр. |
| Значения | 0 — протокол не задействован 1..FFFFh — период посылок в мсек |
Объект 1018 Идентификаторы датчика
| Субиндекс | 0 |
| Описание | Наибольшее значение субиндекса |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Константа |
| По умолч. | 4h |
| Субиндекс | 1 |
| Описание | Идентификатор производителя |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Константа |
| По умолч. | Идентификатор производителя по CiA |
| Субиндекс | 2 |
| Описание | Тип датчика |
| Тип данных | Беззнаковое 32-разр. целое |
| По умолч. | 009E000Dh |
| Доступ | Константа |
| Значения | 009E000Dh соответствует 158.14 (2 старших байта, точка, 2 младших) |
| Субиндекс | 3 |
| Описание | Номер разработки датчика |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Константа |
| По умолч. | 00010000h |
| Значения | 00010000 (1.0) |
| Субиндекс | 4 |
| Описание | Заводской номер |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Константа |
| По умолч. | Присваивается изготовителем |
| Значения | например, 07h 01h DCh A5h соответствует «07.122021» |
Объект 1029 Поведение при ошибке
| Субиндекс | 0 |
| Описание | Наибольшее значение субиндекса |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Константа |
| По умолч. | 1 |
| Субиндекс | 1 |
| Описание | Поведение при ошибке связи |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Чтение/запись |
| По умолч. | 1 |
| EEPROM | сохр. |
| Значения | 0 — переход в подготовительный режим 1 — не изменять режим |
Объект определяет поведение при потере связи по CAN-линии.
При значении 0 датчик пытается послать аварийное сообщение об ошибке и переходит в предварительный режим.
При значении 1 датчик не изменяет режим, также посылается аварийное сообщение, и начинает мигать красный светодиод.
При потере связи также устанавливается бит 4 объекта 1001h, а также дополняется массив ошибок — объект 1003h.
Объект 1800 Параметры передачи объекта PDO1
| Субиндекс | 0 |
| Описание | Наибольшее значение субиндекса |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Константа |
| По умолч. | 5 |
| Субиндекс | 1 |
| Описание | Идентификатор (COB-ID), используемый PDO1 |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Константа |
| По умолч. | 180h + номер узла |
| Субиндекс | 2 |
| Описание | Тип передачи PDO1 |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Чтение/запись |
| По умолч. | 1 |
| EEPROM | сохр. |
| Значения | n = 1..F0h — синхронный режим (PDO1 передаётся по каждому n-му сообщению SYNC) n = FEh — асинхронный режим (PDO1 передаётся в цикле по внутреннему таймеру) |
| Субиндекс | 5 |
| Описание | Таймер передачи PDO1 |
| Тип данных | Беззнаковое 16-разр. целое |
| Доступ | Чтение/запись |
| По умолч. | 203h |
| EEPROM | сохр. |
| Значения | 0 — циклическая передача выключена 1..FFFFh — длительность цикла передачи |
*Возможна запись в объект 1800h / 1801h субиндекс 1, но при этом изменяется только старший (31й) бит данных — разрешение/запрет передачи PDO1.
См. также п. 4.3 «Передача данных процесса».
Объект 1801 Параметры передачи объекта PDO2
| Субиндекс | 0 |
| Описание | Наибольшее значение субиндекса |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Константа |
| По умолч. | 5 |
| Субиндекс | 1 |
| Описание | Идентификатор (COB-ID), используемый PDO2 |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Константа |
| По умолч. | 280h + номер узла |
| Субиндекс | 2 |
| Описание | Тип передачи PDO2 |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Чтение/запись |
| По умолч. | 02h |
| EEPROM | сохр. |
| Значения | n = 1..F0h — синхронный режим (PDO2 передаётся по каждому n-му сообщению SYNC) n = FEh — асинхронный режим (PDO2 передаётся в цикле по внутреннему таймеру) |
| Субиндекс | 5 |
| Описание | Таймер передачи PDO2 |
| Тип данных | Беззнаковое 16-разр. целое |
| Доступ | Чтение/запись |
| По умолч. | 100h |
| EEPROM | сохр. |
| Значения | 0 — циклическая передача выключена 1..FFFFh — длительность цикла передачи |
Объект 1A00 Карта размещения информации PDO1
| Субиндекс | 0 |
| Описание | Количество объектов, отображаемых в PDO1 |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Константа |
| По умолч. | 1 |
| Субиндекс | 1 |
| Описание | Содержание PDO1 |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Константа |
| По умолч. | 60040020h |
| Значения | Биты 0..7 — длина объекта (20h = 32бита) Биты 8..15 — субиндекс (0h) Биты 16..31 — индекс объекта, отображаемого в PDO1 (6004h = величина угла в отсчётах) |
Объект 1A01 Карта размещения информации PDO2
| Субиндекс | 0 |
| Описание | Количество объектов, отображаемых в PDO2 |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Константа |
| По умолч. | 1 |
| Субиндекс | 1 |
| Описание | Содержание PDO2 |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Константа |
| По умолч. | 60040020h |
| Значения | Биты 0..7 — длина объекта (20h = 32бита) Биты 8..15 — субиндекс (0h) Биты 16..31 — индекс объекта, отображаемого в PDO2 (6004h = величина угла в отсчётах) |
Объект 2100 Индекс скорости обмена
| Описание | Служит для задания и чтения скорости передачи CAN-шины После установки скорости передачи, память EEPROM должна быть сохранена, и датчик перезапущен |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Чтение/запись |
| По умолч. | 8h |
| EEPROM | сохр. |
| Значения | 0 = 10 кбит/сек 1 = 20 кбит/сек 2 = 50 кбит/сек 3 = 100 кбит/сек 4 = 125 кбит/сек 5 = 250 кбит/сек 6 = 500 кбит/сек 7 = 800 кбит/сек 8 = 1 MБит/сек |
Объект 2101 Номер узла
| Описание | Идентификационный номер узла в CAN-сети |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Чтение/запись |
| По умолч. | 1h |
| EEPROM | сохр. |
| Значения | 0 — запрещённое значение 1..255 — номер узла |
Объект 2800 Счётчик для дополнительной передачи PDO1
| Описание | Определяет количество повторений передачи одинаковых данных для PDO1 |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Чтение/запись |
| По умолч. | 0 |
| EEPROM | сохр. |
| Значения | 0 — счётчик PDO1 выключен, передача данных циклическая по внутреннему таймеру 1..n..255 — значение PDO1 передаётся n раз после изменения |
Объект 2801 Счётчик для дополнительной передачи PDO2
| Описание | Определяет количество повторений передачи одинаковых данных для PDO2 |
| Тип данных | Беззнаковое 8-разр. целое |
| Доступ | Чтение/запись |
| По умолч. | 0 |
| EEPROM | сохр. |
| Значения | 0 — счётчик PDO1 выключен, передача данных циклическая по внутреннему таймеру 1..n..255 — значение PDO1 передаётся n раз после каждого изменения |
Объект 6000 Параметры функционирования
| Описание | Параметры функционирования |
| Тип данных | Беззнаковое 16-разр. целое |
| Доступ | Чтение/запись |
| По умолч. | 0 |
| EEPROM | сохр. |
| Значения | Бит 0 — нарастающий счёт при вращении: 0 — по часовой стрелке 1 — против часовой стрелки |
Объект 6001 Количество отсчётов на оборот
| Описание | Возможное количество отсчётов на оборот |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Константа |
| Значения | например, 20000h соответствует 217=131072 отсчёта |
Объект 6002 Полный диапазон измерения
| Описание | Количество отсчётов полного диапазона измерений |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Константа |
| Значения | например, 20000h соответствует 217=131072 отсчёта |
Объект 6003 Величина предустановки
| Описание | Позволяет приспособить шкалу датчика к механической системе путём установки величины текущего угла в заданное значение и вычисление величины смещения (см. объект 6509h) |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Чтение/запись |
| По умолч. | 0 |
| EEPROM | не сохр. |
| Значения | 0..полный диапазон измерений-1 (см. объект 6002h) |
Объект 6004 Величина угла
| Описание | Величина текущего положения угла в отсчётах |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Только для чтения |
| По умолч. | 0 |
| EEPROM | не сохр. |
| Значения | 0..полный диапазон измерений-1 (см. объект 6002h) |
Объект 6200 Таймер для циклической передачи PDO1
| Описание | Таймер для PDO1 (см. объект 1800h-5) |
| Тип данных | Беззнаковое 16-разр. целое |
| Доступ | Чтение/запись |
| По умолч. | 203h |
| EEPROM | сохр. |
| Значения | 0 — циклическая передача выключена 1..FFFFh — период циклической передачи в мсек |
Объект 6500 Режим функционирования
| Описание | Режим функционирования (см. объект 6000h) |
| Тип данных | Беззнаковое 16-разр. целое |
| Доступ | Только для чтения |
| По умолч. | 0 |
| EEPROM | сохр. |
| Значения | Бит 0 — нарастающий счёт при вращении: 0 — по часовой стрелке 1 — против часовой стрелки |
Объект 6501 Максимальное количество отсчётов на оборот
| Описание | Максимально возможное количество отсчётов на оборот датчика |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Константа |
| По умолч. | — |
| Значения | например, 20000h соответствует 217=131072 отсчёта |
Объект 6502 Максимальное количество оборотов
| Описание | Максимально возможное количество оборотов датчика |
| Тип данных | Беззнаковое 16-разр. целое |
| Доступ | Только для чтения |
| По умолч. | 1 |
Объект 6503 Сообщения об авариях
| Описание | Текущее (последнее) сообщение об аварии |
| Тип данных | Беззнаковое 16-разр. целое |
| Доступ | Только для чтения |
| По умолч. | 0 |
| EEPROM | не сохр. |
| Значения | В соответствии с поддерживаемыми сообщениями (см. объект 6504h) |
Объект 6504 Поддерживаемые сообщения об авариях
| Описание | Возможные коды сообщений об авариях |
| Тип данных | Беззнаковое 16-разр. целое |
| Доступ | Константа |
| По умолч. | 0×0001 |
| Значения | Бит 0 — неверное значение позиции (угла), аппаратная ошибка датчика |
Объект 6505 Предупреждения
| Описание | Текущее (последнее) предупреждение |
| Тип данных | Беззнаковое 16-разр. целое |
| Доступ | Только для чтения |
| По умолч. | 0 |
| EEPROM | не сохр. |
| Значения | В соответствии с поддерживаемыми предупреждениями (см. объект 6506h) |
Объект 6506 Поддерживаемые предупреждения
| Описание | Возможные коды предупреждений |
| Тип данных | Беззнаковое 16-разр. целое |
| Доступ | Константа |
| По умолч. | 0×0004 |
| Значения | Бит 2 — сброс по сторожевому таймеру |
Объект 6507 Профиль и версия программы
| Описание | Номера версий профиля и прогрраммы датчика |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Константа |
| По умолч. | 01000100h |
| Value | Битs 0..15 — номер версии профиля (01) Битs 16..31 — номер версии программы (01) |
Объект 6508 Время работы датчика
| Описание | Время работы дачика от последнего перезапуска (1 = 0,1 часа) |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Только для чтения |
| По умолч. | 0 |
| EEPROM | не сохр. |
| Значения | 0..FFFF FFFFh |
Объект 6509 Величина смещения позиции
| Описание | Вычисляется по значению текущего угла и предустановки (см. объект 6003h) |
| Тип данных | 32-разр. целое со знаком |
| Доступ | Только для чтения |
| По умолч. | 0 |
| EEPROM | сохр. |
| Значения | 0..полный диапазон измерений — 1 (см. объект 6002h) |
Объект 650B Заводской номер датчика
| Описание | Номер датчика, присвоенный производителем |
| Тип данных | Беззнаковое 32-разр. целое |
| Доступ | Константа |
| По умолч. | Присваивается изготовителем |
| Значения | например, 07h 01h DCh A5h соответствует «07.122021» |
См. также объект 1018, субиндекс 4.
6 Технические данные
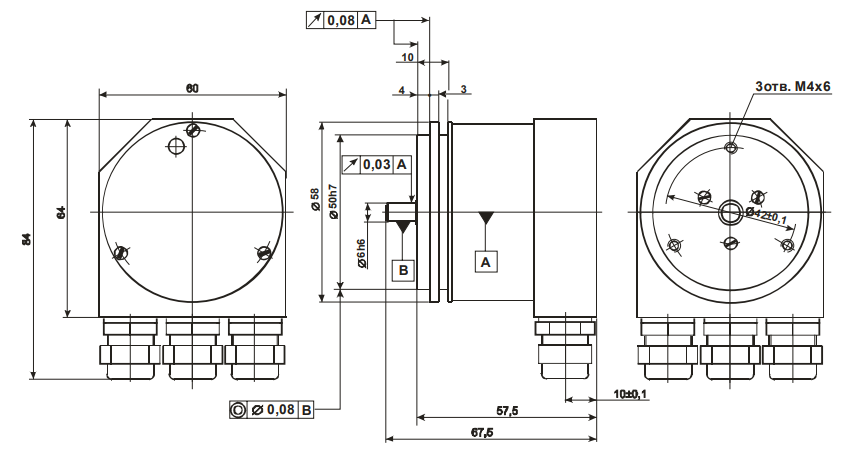
6.1 Механические
| Диаметр корпуса, мм | 58 |
| Класс защиты | IP64, IP65 |
| Диаметр вала, мм | 6 |
| Максимальная скорость, мин-1 | 10 000 |
| Момент трогания ротор, Н·см | 1 |
| Момент инерции, кг·м2 | 1.7·10-6 |
| Макс. нагрузка на вал, N | Осевая — 10, радиальная — 20 |
| Вес, г | 400 |
| Габаритные размеры, мм | 67.5×60×84 |
| Рабочая температура, ºC | 0...50 |
| Вибрационные ускорения, м/сек2 | ≤ 100 (при 55...2000Гц) |
| Ударные ускорения, м/сек2 | ≤ 300 (10 мсек) |
| Рекомендуемые муфты | ЛИР-801, ЛИР-825 |
6.2 Электрические
| Номинальное напряжение питания, В | 24 |
| Допустимое напряжение питания, В | от 10 до 30 |
| Ток потребления, мА | 80 (при Uпит =24В) |
| Рабочая скорость, мин-1 | 3 000 |
| Разрешение, бит | от 10 до 17 |
| Выходной код | Двоичный |
| Присоединение | 3 кабельных ввода |
| Интерфейс | CAN |
| Протокол обмена данными | CANopen, в соответствии со стандартами CiA DS-301, DS-406 |
| Скорость обмена, бит/сек | 10*), 20, 50, 100, 125, 250, 500, 800, 1000 |
| Устанавливаемый номер CAN-узла | от 1 до 99 посредством переключателей или от 1 до 127 через EEPROM |
*) конфигурируется только через EEPROM.
Механическое крепление датчика
- Соедините вал датчика и вал привода, используя соответствующую муфту. Концы валов не должны соприкасаться. Муфта должна быть способна компенсировать смещения в рабочем диапазоне температур и механических люфтов. Обратите внимание на допуски осевых и радиальных нагрузок на вал и на муфту. Рекомендуемые муфты — ЛИР-801, ЛИР-825.
- Закрепите винтами корпус датчика, используя три крепёжных отверстия на фланце, обратите внимание на размер и длину резьбы (M4×6).
- Затяните винты крепления корпуса и муфты.
7 Электрические соединения и установки
7.1 Клеммы и переключатели
Для электрических присоединений необходимо снять крышку датчика, которая крепится тремя винтами. Доступ к клеммам и переключателям показан на рисунке:
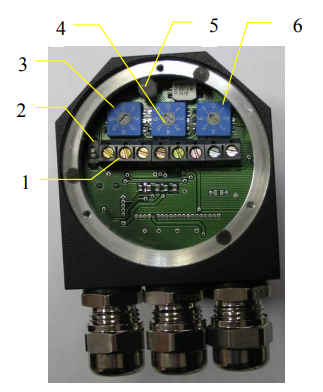
Электрические соединители и установочные переключатели:
- Клеммная колодка для присоединения к CAN-шине и питанию
- Включатель нагрузочного сопротивления
- Круговые переключатели для установки адреса узла
- Круговые переключатели для установки адреса узла
- Двухцветный индикатор ошибки и состояния датчика
- Круговой переключатель установки скорости обмена данными

Возможна установка адреса узла в десятичном виде с использованием круговых переключателей, маркированных как «x10» и «x1». Допустимые адреса — от 1 до 99. Если установлен адрес 0, то используется значения адреса и скорости обмена из энергонезависимой памяти (EEPROM) или значения по умолчанию. Переключатель «Baud» используется для установки Индекса скорости передачи. Соответствие между индексами и скоростями обмена приведено на стр.15.
Однополюсный переключатель, расположенный слева, используется для подключения терминального резистора номиналом 120 Ом в случае, если датчик является последним устройством на CAN-шине.
Клеммный блок используется для подключения проводов CAN-линии (три контакта для входного кабеля и три — для выходного), а также для подключения питания отдельным кабелем (два контакта). Обозначения контактов промаркированы на печатной плате, описание см. в таблице на стр.37.
Двухцветный светодиод служит для индикации ошибок и состояния датчика как CAN015-устройства:
| ЗЕЛЁНЫЙ | КРАСНЫЙ | Значение |
| ВЫКЛ | ВЫКЛ | Нет питания |
| ВКЛ | ВЫКЛ | Рабочий режим |
| МИГАЕТ | ВЫКЛ | Подготовительный режим |
| X | МИГАЕТ | Нет подключения к CAN-шине |
| ВЫКЛ | ВКЛ | Ошибка EEPROM |
7.1 Присоединение кабеля
На датчике расположены три кабельных ввода. Левый и средний вводы предназначены для подключения входного и выходного CAN-кабеля, правый — для кабеля питания. Подсоединять кабели рекомендуется в следующем порядке:
- Зачистите кабель в соответствии с рисунком. Размеры даны в миллиметрах.

- Ослабьте гайку кабельного ввода.
- Вставьте кабель внутрь уплотнения ввода.
- Подключите проводники к соответствующим контактам клеммного блока.
- Затяните гайку кабельного ввода и винты клеммного блока.
- Повторите для оставшихся двух кабелей.
Экран CAN-кабеля следует, в зависимости от конкретной конфигурации CAN-линии, подключить к клеммам земли (G) или соединить с корпусом датчика посредством кабельного ввода.
Не прилагайте чрезмерных усилий при затяжке винтов клеммного блока!
Читайте также
6296
15.05.26
Как расшифровать код ошибки на стойке Фанук и быстро устранить неисправность станка с ЧПУ. Полный справочник по ошибкам FANUC: SV0401, SV0368, SV0436, SV0410, DS0300, SP1220, SP9031, SW0100 и другие.
2884
23.06.26
ЛИР-7М – закрытый инкрементный оптоэлектронный датчик линейных перемещений СКБ ИС. Узнайте совместимость, скачайте паспорт изделия и узнайте о новых моделях для замены

2771
23.06.26
ЛИР-8М - закрытый инкрементный оптоэлектронный датчик линейных перемещений СКБ ИС с увеличенным диапазоном. Получите актуальные технические характеристики, паспорт изделия и назначение.